太空机器人是一种由人工智能和先进技术所构建的机械设备,专门用于在太空环境中执行各种任务。随着太空探索的不断深入和人类对宇宙的日益探索,太空机器人的应用也变得越来越广泛。太空机器人有着许多独特的特点和功能。首先,它们经过严格的测试和设计,能够适应太空中的极端环境,例如真空、极端温度和高辐射。这使得机器人能够在太空中长时间运行,执行各种任务,为宇航员提供支持。
太空机器人的控制和操作也是一项复杂的工程。由于信号传输的延迟和太空环境的极端条件,地球上的操作员需要精确地控制着机器人的行动。为此,专门的远程遥控系统和虚拟现实技术被广泛应用,使操作员能够感受到机器人所处的环境,做出相应的指令。
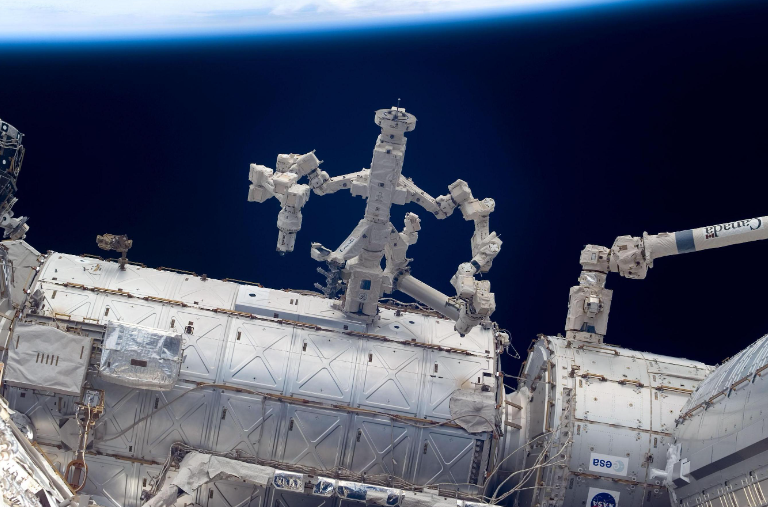
 太空机器人
太空机器人
太空机器人具有多种功能。它们可以进行维修和维护任务,包括修复太空站外壳的损坏、更换零部件和执行日常维护工作。此外,机器人还可以进行科学研究,收集样本和数据,探测宇宙中的奥秘。它们还可以用于搜寻和救援行动,帮助寻找失联的宇航员或损坏的飞行器。
太空机器人,是一种在航天器或空间站上作业的具有智能的通用机械系统。太空机器人具有机械臂和电脑,能实现感知、推理和决策 等功能,可以象人一样在事先未知的空间环境下完成各种任务。只有操作功能不具备智能的简单机器人一般称为机械手。太空机器人工作在微重力、高真空、超低温、强辐射、照明条件差的空间环境下,它与地面上用的工业机器人有很大差别。在失重条件下物体处于漂浮状态,给太空机器人操作带来种种困难。空间视觉识别以及视觉与手爪的配合较地面更困难。太空机器人需要采用三维彩色视觉系统,以便同时确定物体的位置和方向,还要有便于更换的灵巧末端操纵器,利用其接近觉、触觉、力觉、滑觉传感器配合视觉系统完成各种操作任务。
1.空间建筑及装配:一些大型的安装部件,例如无线电天线、太阳能电池、各个舱段的组装等舱外活动都离不开空间机器人、机器人将承担搬运、各构件之间的连接紧固有毒或危险品的处理等任务。在不久的将来人造空间站初期建造一半以上的工作都将由机器人完成。 2.卫星和其他航天器的维护与修理、随着人类在太空的活动不断发展。人类在太空的财产也越来越多,其中人造卫星也占了绝大多数。如果这些卫星一旦发生故障,丢弃它们在发射新的卫星就很不经济,必须设法修理后使他们重新发挥作用。但是如果派宇航员去修理。又牵扯到舱外活动的问题,而且由于航天器处于强烈宇宙辐射的环境之下,人根本无法执行任务,所以只能依靠机器人,空间机器人所进行的维护和修理有回收失灵卫星,对故障卫星进行就地修理。维空间飞行器补给物资等。
3.空间生产和科学试验宇宙空间为人类提供了地面上无法实现的微重力和高真空环境,利用这一环境可以生产出地面上无法生产或难以生产出的产品。在太空中,还可以进行地面上不能做的科学实验。和空间装配、空间修理不同,空间生产和科学试验主要在舱内环境里进行。操作内容多半是重复性动作。在多数情况下宇航员可以直接检查与控制。这时候的空间机器人如同工作在地面工厂里的生产线上一样。因此,可以采用的机器人多是通用型多功能机器人。
最简单的太空机器人,一种由人操纵的多关节机械装置。它仅起执行机构的作用,需要由人不断操纵。操作者是控制回路的直接组成部分。由于远程操作带来信号传输和处理的延时,控制系统可能失稳。早期航天器上的机器人均属此种类型。1967年美国“观察者”-Ⅲ航天器上安装的机械手,在地面操作者控制下,用手爪在月面上完成了挖沟操作并进行了土壤实验。1976年,美国“海盗”号火星登陆器上安装的机器人接收地面遥控指令后,启动一个预先编好的程序,便在指定的表面上着陆,取回火星表层的土样,并完成挖沟操作。美国航天飞机上安装的遥控机械手在航天员的遥控操纵下多次成功地释放卫星入轨,并在轨道上回收了出故障的通信卫星。1986年 2月苏联发射的“和平”号空间站上安装了遥控机械手,它可将对接在轴向对接口上的航天器转移到侧向对接口上,腾出轴向对接口供下次对接时使用。 一种人机混合的遥控系统。它将遥控和一定级别的自主技术相结合。系统有两个控制回路:本地回路和远地回路,两回路之间由远程通信联系。工作在低智能和高响应率的远地回路的太空机器人接到本地回路控制人员的遥控操作指令后,根据自身的敏感器信息和智能,在远地计算机控制下完成指定操作。操作者则工作在高智能和低响应率的本地回路内,他根据机器人发来的各种信息监控机器人在远地控制回路内的工作,不时向它发出指令,远地计算机根据指令控制机器人的操作。操作人员无须直接介入机器人回路,就仿佛身临现场一样遥控操作,从而消除了操作者的疲劳感,大大提高工作效率。初期空间站开发中应用的主要就是这种机器人。 不需要人操纵的智能机器人。它具有视觉、听觉、触觉等感官功能。机器人接到航天员的命令后(或根据空间站上专家系统的指令),自行规划、编程、诊断、决策,自主完成装配、修理或实验任务。它也可乘坐喷气背包到远离空间站的轨道现场执行任务。 机器人已经被应用于医疗、娱乐、国防、公共安全以及太空探索等领域并且技术越发先进。一些机器人完全实现自治,其他则需要人输入命令。 2011年2月24日,佛罗里达州的肯尼迪航天中心,美国宇航局的类人机器人RobonautR2A向同伴RobonautR2B挥手说“再见”。R2B搭乘“发现”号航天飞机奔赴国际空间站。
太空机器人的应用正在不断扩展。例如,在国际空间站上,机器人被用于协助宇航员进行工作,提供支持和帮助完成复杂的任务。此外,一些国家还计划将机器人送往月球和其他行星,进行探测和建设工作。这些机器人将成为人类探索宇宙的重要工具,为未来的太空基地和探险任务提供关键支持。空机器人的发展也面临着一些挑战。首先,太空机器人的成本很高,包括设计、制造、发射和维护等方面的开销巨大。其次,由于太空环境的极端条件,机器人的可靠性和耐用性也是一个重要的问题。这需要设计师和工程师投入大量时间和精力来确保机器人在极端环境中能够正常运行,并尽可能延长其使用寿命。