雷达
雷达,是英文Radar的音译,源于radio detection and ranging的缩写,意思为"无线电探测和测距",即用无线电的方法发现目标并测定它们的空间位置。因此,雷达也被称为“无线电定位”。雷达是利用电磁波探测目标的电子设备。雷达发射电磁波对目标进行照射并接收其回波,由此获得目标至电磁波发射点的距离、距离变化率(径向速度)、方位、高度等信息。雷达的种类繁多,分类的方法也非常复杂,一般为军用雷达。 雷达
雷达
发展起源 编辑本段

二战以后,雷达发展了单脉冲角度跟踪、脉冲多普勒信号处理、合成孔径和脉冲压缩的高分辨率、结合敌我识别的组合系统、结合计算机的自动火控系统、地形回避和地形跟随、无源或有源的相位阵列、频率捷变、多目标探测与跟踪等新的雷达体制。
后来随着微电子等各个领域科学进步,雷达技术的不断发展,其内涵和研究内容都在不断地拓展。雷达的探测手段已经由从前的只有雷达一种探测器发展到了红外光、紫外光、激光以及其他光学探测手段融合协作。
当代雷达的同时多功能的能力使得战场指挥员在各种不同的搜索/跟踪模式下对目标进行扫描,并对干扰误差进行自动修正,而且大多数的控制功能是在系统内部完成的。
自动目标识别则可使武器系统最大限度地发挥作用,空中预警机和JSTARS这样的具有战场敌我识别能力的综合雷达系统实际上已经成为了未来战场上的信息指挥中心。
发展历史 编辑本段
1842年,奥地利物理学家多普勒(Christian Andreas Doppler)率先提 出利用多普勒效应的多普勒式雷达。
1864年,英国物理学家麦克斯韦(James Clerk Maxwell)推导出可计算电磁波特性的公式。
1886年,德国物理学家赫兹(Heinerich Hertz)展开研究无线电波的一系列实验。
1888年赫兹成功利用仪器产生无线电波。
1897年汤姆逊(JJ Thomson)展开对真空管内阴极射线的研究。
1904年侯斯美尔(Christian Hülsmeyer)发明电动镜(telemobiloscope),是利用无线电波回声探测的装置,可防止海上船舶相撞。 雷达
雷达
 雷达
雷达1906年德弗瑞斯特(De Forest Lee)发明真空三极管,是世界上第一种可 放大信号的主动电子元件。
1916年马可尼( Marconi)和富兰克林(Franklin)开始研究短波信号反射。
1917年罗伯特·沃特森·瓦特(Robert Watson-Watt)成功设计雷暴定位装置。
1922年马可尼在美国电气及无线电工程师学会(American Institutes of Electrical and Radio Engineers)发表演说,题目是可防止船只相撞的平面角雷达。
1922年美国泰勒和杨建议在两艘军舰上装备高频发射机和接收机以搜索敌舰。
1924年英国阿普利顿和巴尼特通过电离层反射无线电波测量赛层(ionosphere)的高度。美国布莱尔和杜夫用脉冲波来测量亥维塞层。
1925年贝尔德(John L. Baird)发明机动式电视(现代电视的前身)。
1925年伯烈特(Gregory Breit)与杜武(Merle Antony Tuve)合作,第一次成功使用雷达,把从电离层反射回来的无线电短脉冲显示在阴极射线管上。
1931年美国海军研究实验室利用拍频原理研制雷达,开始让发射机发射连续波,三年后改用脉冲波。
1935年法国古顿研制出用磁控管产生16厘米波长的信号,可以 在雾天或黑夜发现其他船只。这是雷达和平利用的开始。
1935年英国罗伯特·沃特森·瓦特发明第一台实用雷达。
1936年1月英国罗伯特·沃特森·瓦特在索夫克海岸架起了英国第一个雷达站。英国空军又增设了五个,它们在第二次世界大战中发挥了重要作用。
1937年马可尼公司替英国加建20个链向雷达站。
1937年美国第一个军舰雷达XAF试验成功。
1937年瓦里安兄弟(Russell and Sigurd Varian)研制成高功率微波振荡器,又称速调管(klystron)。

1943年美国麻省理工学院研制出机载雷达平面位置指示器,预警雷达。
1944年马可尼公司成功设计、开发并生产「布袋式」(Bagful)系统,以及「地毡式」(Carpet)雷达干扰系统。前者用来截取德国的无线电通讯,而后者则用来装备英国皇家空军(RAF)的轰炸机队。
1945年二次大战结束后,全凭装有特别设计的真空管──磁控管的雷达,盟军得以打败德国。
1959年美国通用电器公司研制出弹道导弹预警雷达系统,可发跟踪3000英里外,600英里高的导弹,预警时间为20分钟。
1964年美国装置了第一个空间轨道监视雷达,用于监视人造地球卫星或空间飞行器。
1971年加拿大伊朱卡等3人发明全息矩阵雷达。与此同时,数字雷达技术在美国出现。
1993年美国曼彻斯特市德雷尔·麦吉尔发明了多塔查克超智能雷达。
类型分类 编辑本段
1.按照雷达信号形式分类,有脉冲雷达、连续波雷达、脉部压缩雷达和频率捷变雷达等。
2.按照角跟踪方式分类,有单脉冲雷达、圆锥扫描雷达和隐蔽圆锥扫描雷达等。
3.按照目标测量的参数分类,有测高雷达、二坐标雷达、三坐标雷达和敌我识对雷达、多站雷达等。
4.按照雷达采用的技术和信号处理的方式有相参积累和非相参积累、动目标显示、动目标检测、脉冲多普勒雷达、合成孔径雷达、边扫描边跟踪雷达。
5.按照天线扫描方式分类,分为机械扫描雷达、相控阵雷达等。
6.按雷达频段分,可分为超视距雷达、微波雷达、毫米波雷达以及激光雷达等。
其中,相控阵雷达又称作相位阵列雷达,是一种以改变雷达波相位来改变波束方向的雷达,因为是以电子方式控制波束而非传统的机械转动天线面方式,故又称电子扫描雷达相控阵技术,早在30年代后期就已经出现。1937年,美国首先开始这项研究工作。但一直到50年代中期才研制出2部实用型舰载相控阵雷达。80年代,相控阵雷达由于具有很多独特的优点,得到了更进一步的应用。在已装备和正在研制的新一代中、远程防空导弹武器系统中多采用多功能相控阵雷达,它已成为第三代中、远程防空导弹武器系统的一个重要标志。从而,大大提高了防空导弹武器系统的作战性能。在21世纪,相控阵雷达随着科技的不断发展和现代战争兵器的特点,其制造和研究将会更上一层楼。
工作原理 编辑本段
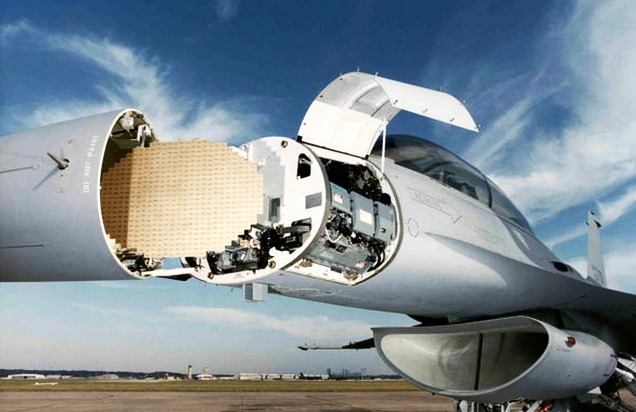
各种雷达的具体用途和结构不尽相同,但基本形式是一致的,包括:发射机、发射天线、接收机、接收天线,处理部分以及显示器。还有电源设备、数据录取设备、抗干扰设备等辅助设备。 雷达
雷达
 雷达
雷达雷达所起的作用跟眼睛和耳朵相似,当然,它不再是大自然的杰作,同时,它的信息载体是无线电波。事实上,不论是可见光或是无线电波,在本质上是同一种东西,都是电磁波,在真空中传播的速度都是光速C,差别在于它们各自的频率和波长不同。其原理是雷达设备的发射机通过天线把电磁波能量射向空间某一方向,处在此方向上的物体反射碰到的电磁波;雷达天线接收此反射波,送至接收设备进行处理,提取有关该物体的某些信息(目标物体至雷达的距离,距离变化率或径向速度、方位、高度等)。
测量速度原理是雷达根据自身和目标之间有相对运动产生的频率多普勒效应。雷达接收到的目标回波频率与雷达发射频率不同,两者的差值称为多普勒频率。从多普勒频率中可提取的主要信息之一是雷达与目标之间的距离变化率。当目标与干扰杂波同时存在于雷达的同一空间分辨单元内时,雷达利用它们之间多普勒频率的不同能从干扰杂波中检测和跟踪目标。测量目标方位原理是利用天线的尖锐方位波束,通过测量仰角靠窄的仰角波束,从而根据仰角和距离就能计算出目标高度。
测量距离原理是测量发射脉冲与回波脉冲之间的时间差,因电磁波以光速传播,据此就能换算成雷达与目标的精确距离。
波段标准 编辑本段
二战后雷达的波段有三种标准,德国标准、美国标准和欧洲标准。由于德国和美国的标准提出的较早,大多数使用的是欧洲新标准:
欧洲新标准下的部分波段表
波段 | 类型 | 波长[cm] | 频率[GHz] |
A | 米波 | <0.25 | |
B | 米波 | 0.25-0.5 | |
C | 分米波 | 30-60 | 0.5-1 |
D | 分米波 | 15-30 | 1-2 |
E | 分米波 | 10-15 | 2-3 |
F | 分米波 | 7.5-10 | 3-4 |
G | 分米波 | 5-7.5 | 4-6 |
H | 厘米波 | 4-5 | 6-8 |
I | 厘米波 | 3-4 | 8-10 |
J | 厘米波 | 1.5-3 | 10-20 |
K | 厘米波 | 0.75-1.5 | 20-40 |
L | 毫米波 | 0.5-0.75 | 40-60 |
M | 毫米波 | 0.3-0.5 | 60-100 |
现用微波分波段代号
波段代号 | 标称波长(cm) | 频率范围(GHz) | 波长范围(cm) |
L | 22 | 1-2 | 30-15 |
S | 10 | 2-4 | 15-7.5 |
C | 5 | 4-8 | 7.5-3.75 |
X | 3 | 8-12 | 3.75-2.5 |
Ku | 2 | 12-18 | 2.5-1.67 |
K | 1.25 | 18-27 | 1.67-1.11 |
Ka | 0.8 | 27-40 | 1.11-0.75 |
U | 0.6 | 40-60 | 0.75-0.5 |
V | 0.4 | 60-80 | 0.5-0.375 |
W | 0.3 | 80-100 | 0.375-0.3 |
我国的频率划分方法
名称 | 符号 | 频率 | 波段 | 波长 | 传播特性 | 主要用途 |
甚低频 | VLF | 3-30KHz | 超长波 | 1KKm-100Km | 空间波为主 | 海岸潜艇通信;远距离通信;超远距离导航 |
低频 | LF | 30-300KHz | 长波 | 10Km-1Km | 地波为主 | 越洋通信;中距离通信;地下岩层通信;远距离导航 |
中频 | MF | 0.3-3MHz | 中波 | 1Km-100m | 地波与天波 | 船用通信;业余无线电通信;移动通信;中距离导航 |
高频 | HF | 3-30MHz | 短波 | 100m-10m | 天波与地波 | 远距离短波通信;国际定点通信 |
甚高频 | VHF | 30-300MHz | 米波 | 10m-1m | 空间波 | 电离层散射(30-60MHz);流星余迹通信;人造电离层通信(30-144MHz);对空间飞行体通信;移动通信 |
特高频 | UHF | 0.3-3GHz | 分米波 | 1m-0.1m | 空间波 | 小容量微波中继通信;(352-420MHz);对流层散射通信(700-10000MHz);中容量微波通信(1700-2400MHz) |
超高频 | SHF | 3-30GHz | 厘米波 | 10cm-1cm | 空间波 | 大容量微波中继通信(3600-4200MHz);大容量微波中继通信(5850-8500MHz);数字通信;卫星通信;国际海事卫星通信(1500-1600MHz) |
极高频 | EHF | 30-300GHz | 毫米波 | 10mm-1mm | 空间波 | 在入大气层时的通信;波导通信 |
波段划分 编辑本段
在主要使用3cm电磁波的火控雷达出现后,3cm波长的电磁波被称为X波段,因为X代表坐标上的某点。
为了结合X波段和S波段的优点,逐渐出现了使用中心波长为5cm的雷达,该波段被称为C波段(C即Compromise,英语“结合”一词的字头)。
在英国人之后,德国人也开始独立开发自己的雷达,他们选择1.5cm作为自己雷达的中心波长。这一波长的电磁波就被称为K波段(K = Kurz,德语中“短”的字头)。
“不幸”的是,德国人以其日尔曼民族特有的“精确性”选择的波长可以被水蒸气强烈吸收。结果这一波段的雷达不能在雨中和有雾的天气使用。战后设计的雷达为了避免这一吸收峰,通常使用频率略高于K波段的Ka波段(Ka,即英语K-above的缩写,意为在K波段之上)和略低(Ku,即英语K-under的缩写,意为在K波段之下)的波段。
最后,由于最早的雷达使用的是米波,这一波段被称为P波段(P为Previous的缩写,即英语“以往”的字头)。
该系统十分繁琐、而且使用不便。终于被一个以实际波长划分的波分波段系统取代,这两个系统的换算如下。
原 P波段 = 现 A/B波段
原 L波段 = 现 C/D 波段
原 S波段 = 现 E/F 波段
原 C波段 = 现 G/H 波段
原 X波段 = 现 I/J 波段
原 K波段 = 现 K 波段
应用领域 编辑本段
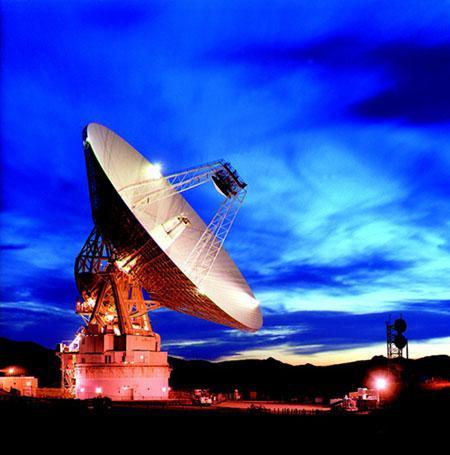
雷达的优点是白天黑夜均能探测远距离的目标,且不受雾、云和雨的阻挡,具有全天候、全天时的特点,并有一定的穿透能力。因此,它不仅成为军事上必不可少的电子装备,而且广泛应用于社会经济发展(如气象预报、资源探测、环境监测等)和科学研究(天体研究、大气物理、电离层结构研究等)。星载和机载合成孔径雷达已经成为当今遥感中十分重要的传感器。以地面为目标的雷达可以探测地面的精确形状。其空间分辨力可达几米到几十米,且与距离无关。雷达在洪水监测、海冰监测、土壤湿度调查、森林资源清查、地质调查等方面也显示出了很好的应用潜力。
附件列表
词条内容仅供参考,如果您需要解决具体问题
(尤其在法律、医学等领域),建议您咨询相关领域专业人士。